Puntos, rectas y planos en 3D
El Punto: La unidad básica
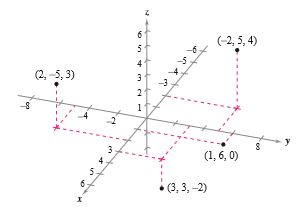
Para dibujar un punto con precisión, lo mejor es usar el método de la “caja” o proyecciones:
- Ubica en el plano base (): Camina unidades sobre el eje de las abscisas y luego unidades paralelamente al eje de las ordenadas.
- Eleva o baja (): Desde ese punto en el “suelo”, sube o baja verticalmente las unidades indicadas en .
- Visualización: Para que no parezca que el punto está “flotando” sin sentido, dibuja líneas punteadas que lo conecten con los ejes.
Distancia entre dos puntos:
d = \sqrt{ (x_2-x_1)^2 + (y_2-y_1)^2 + (z_2-z_1)^2 }Vectores en el espacio
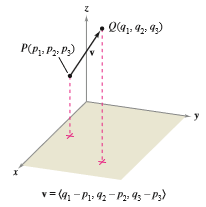
En el espacio, los vectores se representan a través de una terna de ordenadas.
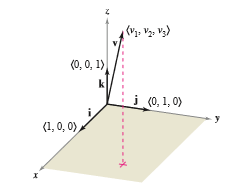
Si se representa un segmento de recta que desde un punto inicial hasta un punto final , entonces
v = (v_1, v_2, v_3) = (q_1 - p_1, q_2 - p_2, q_3 - p_3)
Sean , entonces:
- Igualdad de vectores:
- Longitud de un vector:
- Vector unitario:
- Vectores paralelos:
- Ángulo entre vectores:
- Cosenos directores:
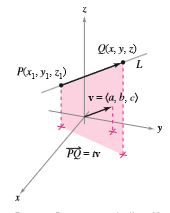
La Recta: Dirección y trayectoria
En R3, una recta no se define solo con una pendiente, sino con un punto de partida y un vector director .
- Cómo dibujarla:
- Dibuja el punto inicial .
- Desde ese punto, traza el vector .
- Extiende una línea infinita que pase por y siga exactamente la misma inclinación que el vector.
- Ecuación vectorial:
1. Los componentes de la ecuación vectorial de la recta
La ecuación es:
- (El Punto Destino): Es el “punto resultante”. Represent las coordenadas donde se encuentra el objeto en un momento determinado.
- (El Punto de Anclaje): Es el punto de partida o posición inicial. De aquí sale la recta. Sus coordenadas son .
- (El Vector Director): Es la “flecha” que indica hacia dónde apunta la recta y con qué inclinación. No tiene una posición fija, solo nos da la dirección.
- (El Parámetro): En ingeniería de software suele ser el Tiempo. Es un número escalar que estira o encoge al vector para llegar a cualquier punto de la recta.
2. ¿Cómo funciona visualmente?
Imagina que quieres programar el disparo de un láser en un entorno virtual:
- es la punta del arma del jugador (su posición en el mapa).
- es hacia dónde está apuntando el jugador (su vector de visión).
- es la distancia que recorre el láser.
- Si , el láser está en el arma.
- Si , el láser avanzó 5 unidades en esa dirección.
- Si es negativo, el láser iría “hacia atrás” de la pistola.
3. De Vectorial a Paramétrica
Como las computadoras procesan los ejes por separado, solemos descomponer en tres ecuaciones simples:
Si y , entonces:
que resultan ser las ecuaciones paramétricas y es el vector director.
Esto es lo que verías dentro del código de un objeto en Unity o Unreal Engine para actualizar su posición en cada frame.
Si los coeficientes directores son diferentes de cero, se puede eliminar el parámetro para obtener las ecuaciones simétricas:
\frac{x-x_1}{a} = \frac{y-y_1}{b} = \frac{z-z_1}{c}La curva: el camino paramétrico
A diferencia de la recta, la curva cambia de dirección constantemente. Se define mediante funciones que dependen de un parámetro (usualmente el tiempo t): .
- Ejemplo clásico (La Hélice): Imagina un punto que gira en un círculo en el plano mientras sube uniformemente en .
- Cómo dibujarla:
- Tabula 4 o 5 valores de (ej. ).
- Dibuja cada punto resultante en el espacio.
- Une los puntos con un trazo suave y fluido.
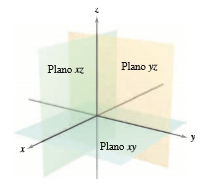
El Plano: La superficie plana
Dibujar un plano “infinito” es imposible, por lo que en ingeniería se dibuja una “traza” o porción del plano. El método más efectivo es el de las intersecciones con los ejes:
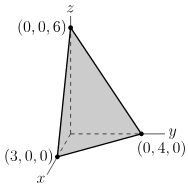
- Halla las intersecciones:
- Si y , despeja (punto en el eje ).
- Si y , despeja (punto en el eje ).
- Si y , despeja (punto en el eje ).
- Dibuja el triángulo: Une esos tres puntos. Ese triángulo es una representación visual de la inclinación y posición del plano en ese octante.
- Vector Normal: Recuerda que el plano siempre es perpendicular al vector .
- Dos planos son perpendiculares entre sí si , en consecuencia los dos vectores normales son paralelos entre sí; ej.
- Si dos vectores normales son perpendiculares entre sí (), entonces los dos planos son perpendiculares; ej.
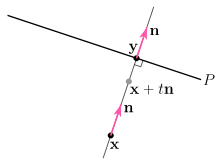
Distancia entre un punto y un plano
\begin{align*}
\text{x} &= (\alpha, \beta, \gamma) \\
P &: ax + by + cz = d \\
\Rightarrow \text{n} & = (a, b, c) \\
\text{x} + t \text{n} & = (\alpha, \beta, \gamma) + t (a, b, c) \\
& = (\alpha + at, \beta + bt, \gamma + ct) \\
t & = \lambda
\end{align*}Hallar el valor de evaluando el punto en el plano . Ello nos llevará a encontrar el punto en el plano más cercano a .
\begin{align*}
\text{x} & = (1, -1, -3) \\
P & : x + 2y + 3z = 18 \\
\Rightarrow \text{n} & = (1, 2, 3) \\
\text{x} + t \text{n} & = (1, -1, -3) + t (1, 2, 3) \\
& = (1 + t, -1 + 2t, -3 + 3t) \\
(1+t) & + 2(-1+2t) + 3(-3+3t) = 18 \\
14t & =28 \\
t & = 2
\end{align*}\begin{align*}
\text{y} & = [\text{x} + t \text{n}]_{t = \lambda} \\
& = (\alpha_2, \beta_2, \gamma_2) \\
|y-x| & = \lambda |n| \\
& = \lambda \sqrt{a^2+b^2+c^2}
\end{align*}\begin{align*}
\text{y} & = [(1+t,-1+2t,-3+3t)]_{t=2} \\
& = (3,3,3) \\
|y-x| & = 2 |(1,2,3)| \\
& = 2 \sqrt{1^2+2^2+3^2} \\
& = 2 \sqrt{14}
\end{align*}Distancia entre dos planos [paralelos]
Uno de los procedimientos para determinar la distancia entre dos planos paralelos, es halla un punto en uno de los planos y determinar la distancia entre dicho punto y el segundo plano, no sin antes verificar que los planos son paralelos.
\begin{align*}
P_1& : x + 2y + 2z = 1 & P_2 & : 2x + 4y + 4z = 11 \\
n_1 & = (1, 2, 2) & n_2 & = (2, 4, 4) = 2n_1 & \therefore P_1 || P_2
\end{align*} \\Para encontrar un punto en el primer plano, podemos sustituir dos variables en el plano y hallar el valor de la tercera, así generar el punto en el plano:
P_1 : x + 2y + 2z = 1 \\
y = 0; z = 0 \Rightarrow x + 2(0) + 2(0) = 1 \\
x = 1 \\
\text{x} = (1, 0, 0)Posteriormente, repetimos los pasos del procedimiento para calcular la distancia del punto al segundo plano:
\begin{align*}
\text{x} + t \text{n} & = (1,0,0) + t(2, 4, 4) \\
& = (1+2t,4t,4t) \\
2(1+2t) + 4(4t) + 4(4t) & = 11 \\
36t & = 9 \\
t & = 1 / 4 \\
\text{y} & = [ (1+2t,4t,4t) ]_{t=1/4} \\
& = (\frac{3}{2}, 1, 1) \\
|\text{x} - \text{y}| & = \frac{1}{4} \sqrt{ 2^2 + 4^2 + 4^2 } \\
& = \frac{1}{4} \times \sqrt{ 36} \\
& = \frac{3}{2}
\end{align*}Feldman, J., Rechnitzer, A. et Yeager, E. (30 de octubre de 2022). Ecuaciones de planos en 3d. University of British Columbia. Recuperado de https://espanol.libretexts.org/Bookshelves/Matematicas/Calculo_multivariable_CLP-3_(Feldman_Rechnitzer_y_Yeager)/01%3A_Vectores_y_Geometr%C3%ADa_en_Dos_y_Tres_Dimensiones/1.04%3A_Ecuaciones_de_planos_en_3d
Nodo Universitario de la Universidad de Guanajuato (s/f). INTRODUCCIÓN AL AL GEOMETRÍA ANALÍTICA EN EL ESPACIO. México. Recuperado de https://oa.ugto.mx/oa/oa-enmssm-0000001/introduccion_al_al_geometra_analtica_en_el_espacio.html